現在位置:新知 > 自動化 工業機器人
|
工業機器人 (Industrial Robot)
工業機器人按照ISO定義,它是面向工業領域的多關節機械手或多自由度的機器人。工業機器人是自動執行工作的機器裝置,是靠自身動力和控制能力來實現各種功能的一種機器。它可以接受人類指揮,也可以按照預先編排的程序運行,現代的工業機器人還可以根據人工智慧技術制定的原則綱領行動。 工業機器人的典型應用包括焊接、刷漆、組裝、採集和放置(例如包裝、碼垛和 SMT)、產品檢測和測試等; 所有的工作的完成都具有高效性、持久性、速度和準確性。 喬治·戴沃爾最早提出了工業機器人的概念,並在1954年申請了專利。 (專利批准在1961年). 在1956年,戴沃爾和約瑟夫·恩蓋爾柏格基於戴沃爾的原先專利,合作建立了UNIMATION公司。1959年UNIMATION公司的第一台工業機器人在美國誕生,開創了機器人發展的新紀元。 機器人(Robot, 自動控制機器)一詞,最早出現在西元1920年捷克科幻作家恰配克的《羅索姆的萬能機器人》中[1],原文作「Robota」,後來成為西文中通行的「Robot」。 1967年日本科學家森政弘與合田周平提出:「機器人是一種具有移動性、個體性、智能性、通用性、半機械半人性、自動性、奴隸性等7個特徵的柔性機器。」 應用機器人 2008年底東京消防廳引進了市面第一台雙臂式作業機 現今,對人類來說,太髒太累、太危險、太精細、太粗重或太反覆無聊的工作,常常由機器人代勞。從事製造業的工廠里的生產線就應用了很多工業機器人,其他應用領域還包括:射出成型業、建築業、石油鑽探、礦石開採、太空探索、水下探索、毒害物質清理、搜救、醫學、軍事領域等。 |

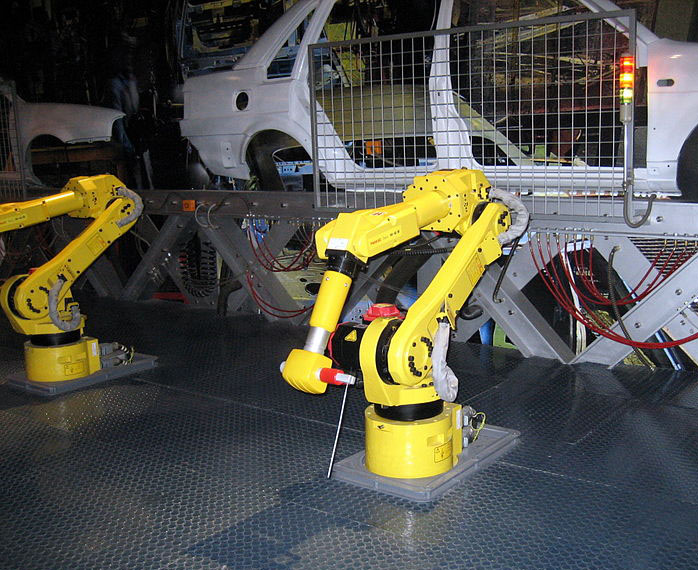
工廠的機器人Automation of foundry with robot (2003)
|
|
工業機器人
指由操作機(機械本體)、控制器、伺服驅動系統和感測裝置構成的一種仿人操作、自動控制、可重複編程、能在三維空間完成各種作業的光機電一體化生產設備,特別適合於多品種、變批量的彈性製造系統。 一個工業機器人可以僅包括一個感覺與動作之間的連結,而且這個連結不是由人手動操控的。機器人的動作也許是電動機或是驅動器(也稱效應器)移動一隻手臂,張開或關閉一個夾子的動作。此種直接而詳盡的控制跟回饋也許是由在外部或是嵌入式的電子計算機或是微控制器上運行的程式提供。根據這個定義,所有的自動裝置都算機器人。工業機器人可直接接受人類指令,也可以執行預先編排的程序,也可以根據以人工智慧技術制定的原則綱領行動。 工業機器人發展現狀方面, 2007年全球共新安裝工業機器人114,365 台,較2006年新安裝的111,052 台,上升了3%。截至2007 年底,全球工業機器人保有量已達到了995,000台。2007年,亞洲及美洲工業機器人的裝配量明顯上升,汽車工業以及電子電器行業的發展是上述地區工業機器人裝配量強勁增長的主要因素。此外,化工領域用工業機器人的需求量也迅速上升。 |
工業機器人 Robot worker

德國食品工廠的自動化工業機器人處理各種食品,例如麵包等 Factory Automation Robotics Palettizing Bread (2005)
|

2008年底日本東京消防廳引進了市面第一台雙臂式作業機
|
